Publicité
Les voitures télécommandées sont amusantes, bien sûr, mais conduite autonome les voitures robotiques sont encore plus amusantes. Dans ce didacticiel, nous allons construire un robot à quatre roues qui peut se déplacer et éviter les obstacles. j'ai acheté ce kit 4 roues motrices complet d'AliExpress, mais vous pouvez facilement acheter la plupart de ces composants dans un magasin d'électronique et les assembler vous-même.
Je vous recommande de lire toutes les instructions avant de commencer, car cela clarifiera certaines choses qui pourraient prêter à confusion la première fois. De plus, cela peut ressembler à un projet très long et avancé en raison de la longueur des instructions, mais c'est en fait assez simple. Pas besoin d'être intimidé - il s'agit d'un projet de niveau débutant avec lequel vous pouvez obtenir des résultats satisfaisants, puis continuer à mesure que vous en apprenez plus. Vous n'aimez pas ce style de robot? Voici encore plus Robots Arduino 8 robots Arduino que vous pouvez construire pour moins de 125 $ L'Arduino peut faire beaucoup, mais saviez-vous qu'il peut créer des robots à part entière? Pour assez bon marché aussi! Lire la suite vous pourriez facilement construire à la place.
Voici ce que nous avons, après avoir tout sorti de l'emballage:

Pour commencer, nous allons attacher les moteurs et le pont H (la carte qui fournit la puissance aux moteurs) à la partie inférieure du châssis. Tout d'abord, fixez les quatre supports métalliques (ce sont des blocs métalliques percés rectangulaires) à chaque moteur à l'aide de deux boulons longs et de deux écrous.
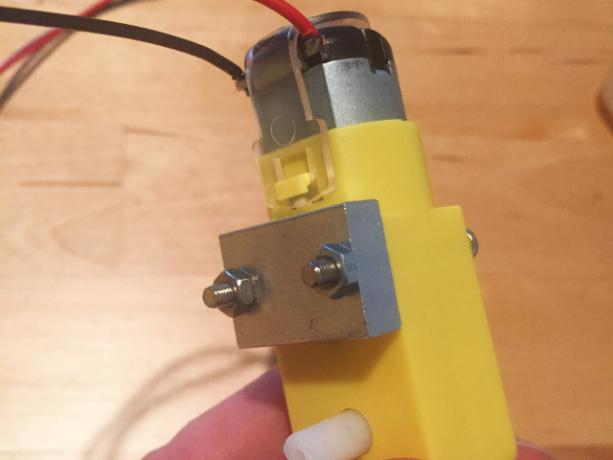
Vous devez vous assurer qu'ils sont correctement fixés, alors consultez l'image ci-dessous pour vous assurer que le côté du bloc avec deux trous percés sera orienté vers le bas. Notez que les fils de chaque moteur pointent vers le centre du châssis.
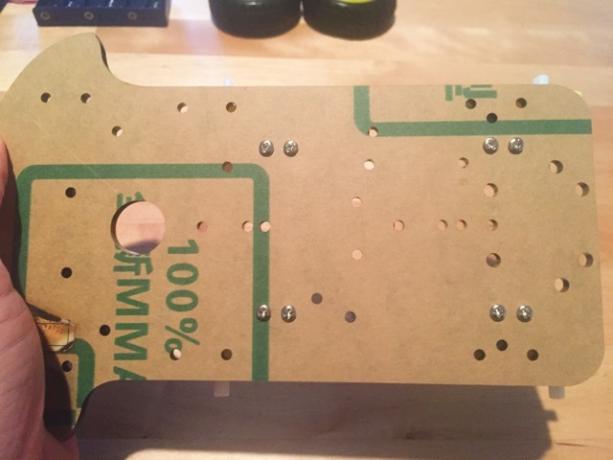
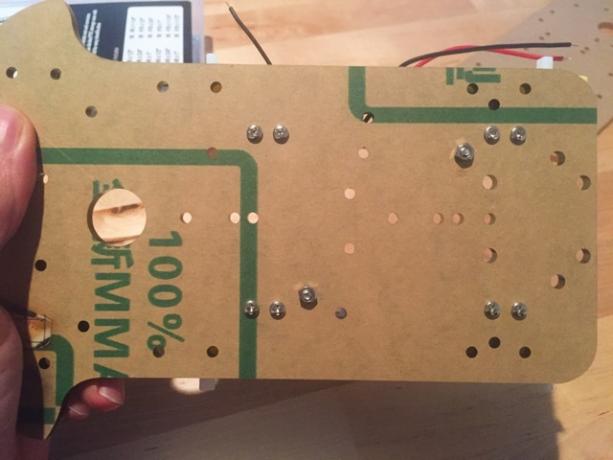
Maintenant, chaque moteur peut être fixé au châssis en utilisant deux boulons courts au bas de chaque support métallique. Voici une vue du bas du châssis afin que vous puissiez voir où les boulons doivent être:
La prochaine étape consiste à fixer le pont H (c'est le tableau rouge, dans mon kit) au châssis. Vous voudrez peut-être attendre que tous les fils soient attachés au pont H avant de faire cela, mais cela dépend de vous (j'ai trouvé que c'était plus facile). Une note rapide: il manquait un certain nombre d'attaches à mon kit, j'ai donc utilisé du ruban électrique pour fixer le pont. Cependant, vous pouvez voir ici où les boulons et les écrous auraient disparu:
Maintenant que le pont H a été fixé, vous pouvez commencer à câbler l'alimentation. Étant donné que le support de batterie six-AA est livré avec un adaptateur CC, vous devrez soit couper l'extrémité (ce que j'ai fait), soit passer des câbles de démarrage vers les batteries elles-mêmes.

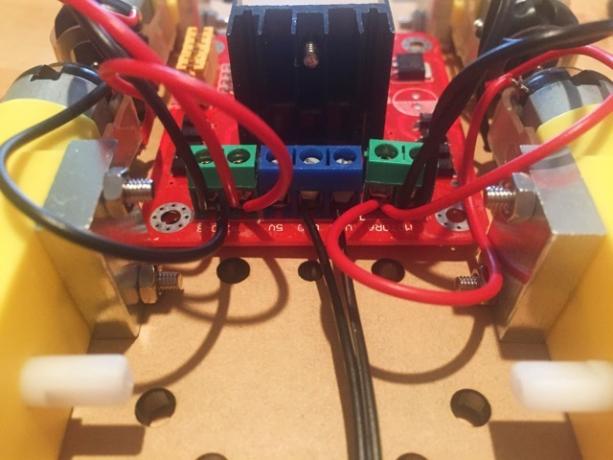
Peu importe comment vous décidez de le faire, vous acheminerez le fil positif vers le port étiqueté "VMS" et le fil négatif vers celui étiqueté "GND" sur le pont. Dévissez les attaches et assurez-vous qu'elles sont bien fixées. Ensuite, vous allez connecter les fils du moteur. Des deux côtés, il y a un ensemble de deux ports; l'un est étiqueté «MOTORA» et l'autre «MOTORB». Tous les deux les fils rouges de chaque côté iront dans le port vert le plus au centre, et les deux fils noirs iront dans le plus à l'extérieur. Cette image devrait le rendre plus clair:
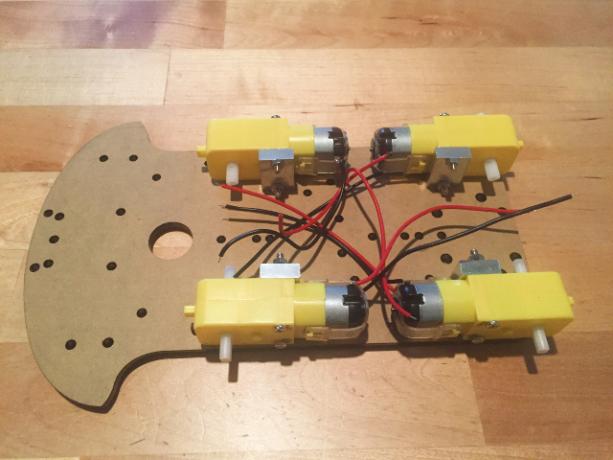
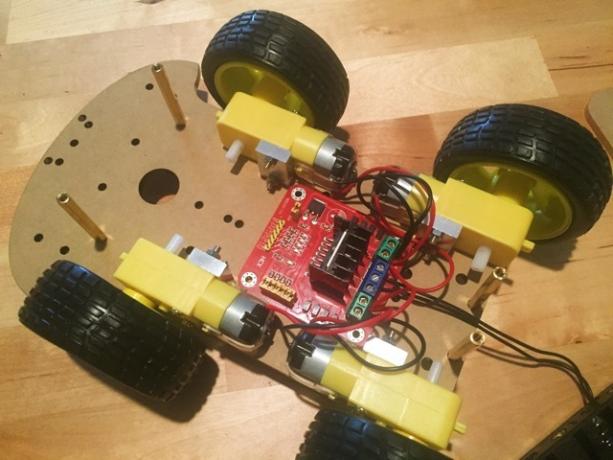
J'ai découvert que je devais retirer une partie du boîtier des fils du moteur pour que cela fonctionne. Maintenant que les moteurs et l'alimentation sont tous câblés, faites glisser les roues sur les arbres d'entraînement du moteur, et fixez les quatre arbres en cuivre aux emplacements indiqués dans l'image ci-dessous (chaque arbre en cuivre a besoin d'un petit boulon). Ce robot commence à prendre forme!
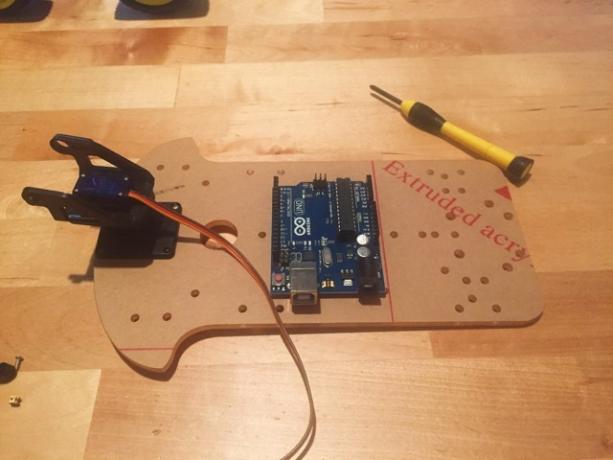
Maintenant, mettez cette partie du châssis de côté et attrapez l'autre qui va s'asseoir sur le dessus. L'étape suivante consiste à fixer l'Arduino — encore une fois, j'ai dû utiliser du ruban électrique, mais vous devriez pouvoir mieux sécuriser le vôtre avec des boulons et des écrous.

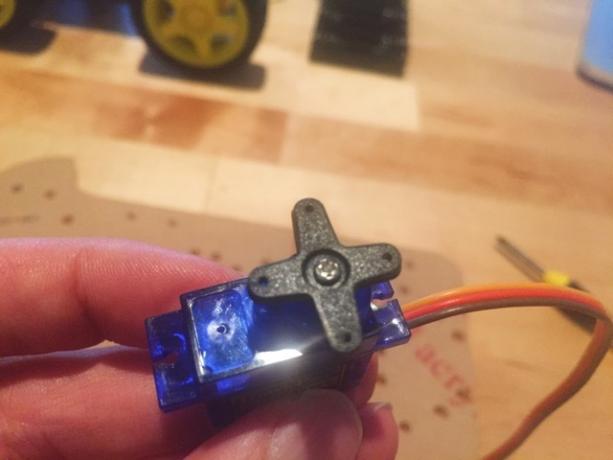
L'étape suivante nécessite le micro servo, la traverse noire, le support de servo (qui se compose de trois pièces en plastique noir) et quelques petites vis. Utilisez l'une des vis pointues les plus grandes du kit pour fixer la traverse noire au micro servo:
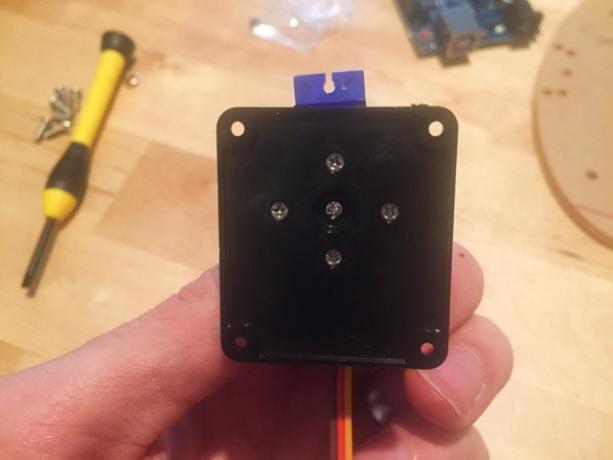
Retournez ensuite le servo à l'envers dans l'anneau en plastique noir du support. Assurez-vous que les fils sortant du servo sont orientés dans la même direction que la partie la plus longue du support (encore une fois, voir le image ci-dessous), et utilisez quatre minuscules vis pour fixer la barre transversale (il y a quatre trous dans le support qui s'alignent avec les trous sur le barre transversale).

Voici à quoi il ressemble une fois attaché:
Enfin, prenez les deux autres pièces du support de servo et enclenchez-les sur le servo (il y a des rainures dans les pièces latérales qui correspondent à la languette en plastique sur le servo).
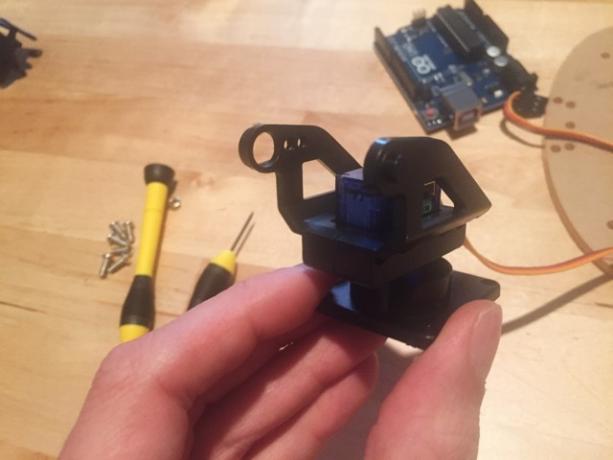
Maintenant que le support de servo est complet, il peut être monté sur le châssis.
Voici où vont les boulons:
Il est temps de regarder notre robot. Fixez le capteur à ultrasons au support de servo à l'aide de deux attaches zippées.

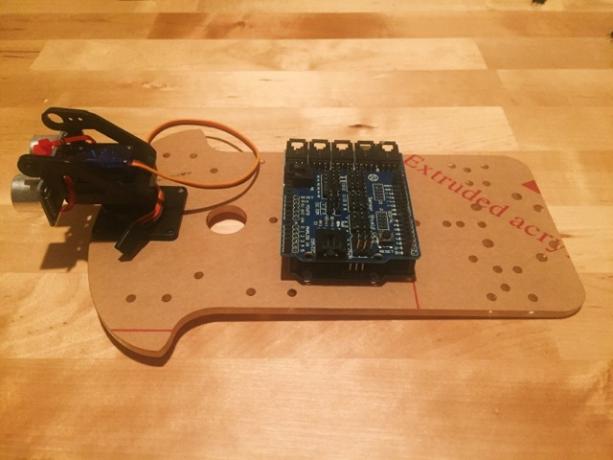
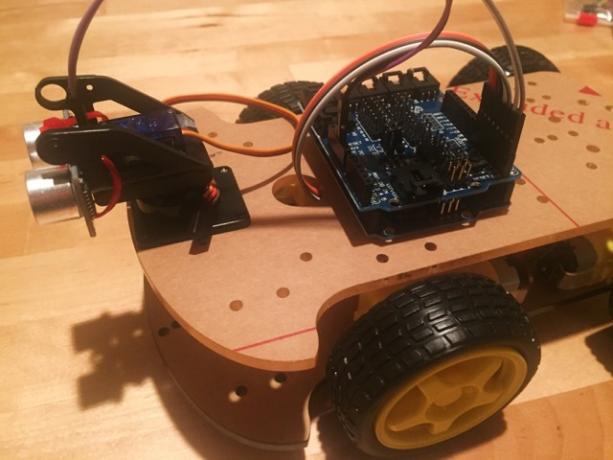
Si vous travaillez avec le même kit que moi, vous aurez reçu un bouclier de capteur Arduino. Nous ne l’utiliserons pas dans cette version, mais vous pouvez l’afficher au-dessus de l’UNO maintenant si vous le souhaitez (comme je l’ai dans l’image ci-dessous). Alignez simplement les broches sur le bas du blindage avec les ports d'E / S sur l'Arduino et appuyez vers le bas pour les connecter. Vous n'en avez pas besoin pour le moment, mais les boucliers peuvent être utiles Les 4 meilleurs boucliers Arduino pour donner de la puissance à vos projetsVous avez acheté un kit de démarrage Arduino, vous avez suivi tous les guides de base, mais maintenant vous avez atteint une pierre d'achoppement - vous avez besoin de plus de bits et de bobs pour réaliser votre rêve d'électronique. Heureusement, si vous avez ... Lire la suite .
Que vous connectiez ou non un blindage de capteur, vous aurez maintenant besoin de quatre fils pour connecter le capteur à ultrasons à l'Arduino. Il y a quatre broches sur le capteur, VCC, GND, TRIG et ECHO. Connectez VCC à la broche 5V sur l'Arduino, GND à GND et TRIG et ECHO aux broches d'E / S 12 et 13.
Saisissez maintenant la partie inférieure du châssis et connectez six fils de cavalier aux broches d'E / S du pont H (elles sont marquées ENA, IN1, IN2, IN3, IN4 et ENB). Prenez note des fils de couleur connectés à quels ports, comme vous devrez le savoir plus tard.

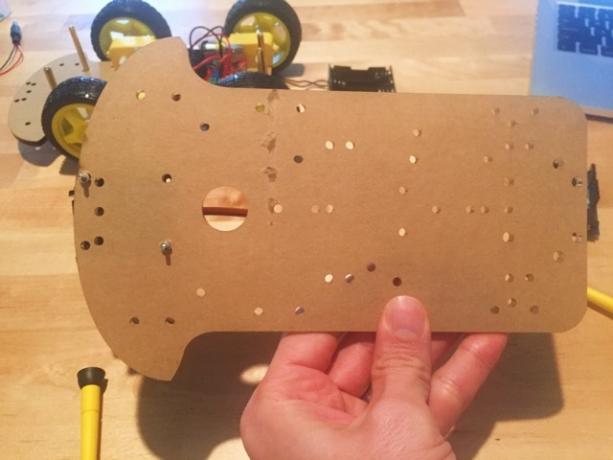
Il est maintenant temps de commencer à assembler cette chose. Saisissez la partie supérieure du châssis et placez-la au-dessus des arbres en cuivre connectés à la partie inférieure, et tirez les fils attachés au pont H à travers le trou au centre du châssis. Connectez les six fils aux ports d'E / S comme suit:
- ENA vers le port d'E / S 11
- ENB vers le port d'E / S 10
- A1 vers le port d'E / S 5
- A2 vers le port d'E / S 6
- B1 vers le port d'E / S 4
- B2 vers le port d'E / S 3
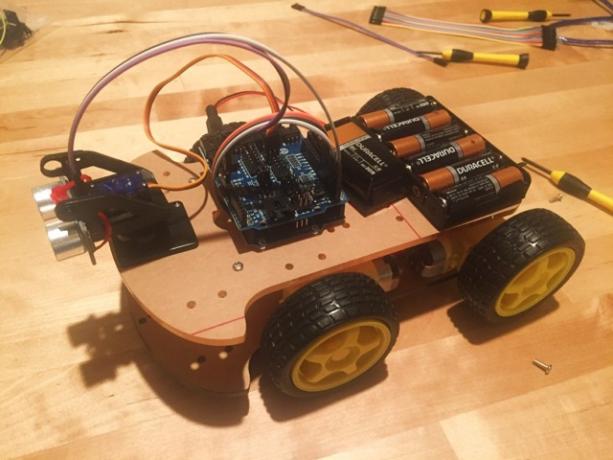
Maintenant, utilisez quatre vis courtes pour fixer la partie supérieure du châssis aux arbres en cuivre. Placez le support de batterie six-AA sur le dessus du châssis (vissez-le si vous le pouvez), fixez le support de cellule 9V à l'Arduino, et ce bot est prêt à basculer!
Eh bien, presque prêt à basculer. Il n'a pas encore assez de personnalité.
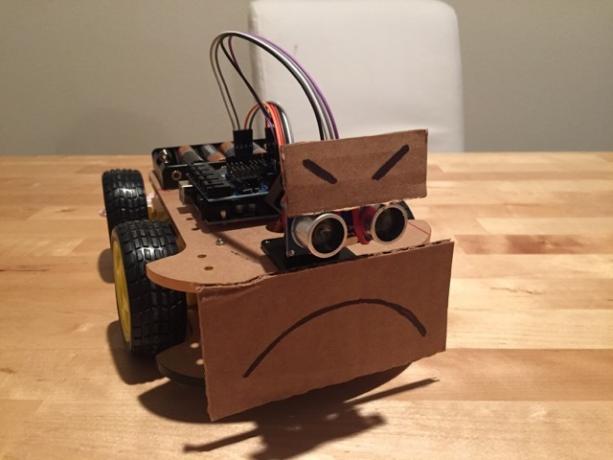
Et voilà. Maintenant, pour lui donner un cerveau. Faisons un peu de programmation.
La première chose que nous ferons est de tester pour vous assurer que le pont et les moteurs sont correctement branchés. Voici un petit croquis qui indiquera au bot d'avancer pendant une demi-seconde, de reculer pendant une demi-seconde, puis de tourner à gauche et à droite:
C'est beaucoup de code pour un test simple, mais la définition de toutes ces fonctions le rend plus facile à modifier plus tard. (Un grand merci à Billwaa pour son billet de blog sur l'utilisation du pont en H pour définir ces fonctions.) En cas de problème, vérifiez toutes vos connexions et assurez-vous que les fils sont connectés aux bonnes broches. Si tout a fonctionné, il est temps de passer au test du capteur. Pour utiliser le capteur à ultrasons, vous voudrez téléchargez la bibliothèque NewPing, puis utilisez Esquisse> Inclure la bibliothèque> Ajouter une bibliothèque .ZIP… pour charger la bibliothèque.

Assurez-vous que vous voyez l'instruction include en haut de votre croquis; sinon, appuyez sur Esquisse> Inclure la bibliothèque> NewPing. Une fois que vous avez fait cela, chargez l'esquisse suivante:
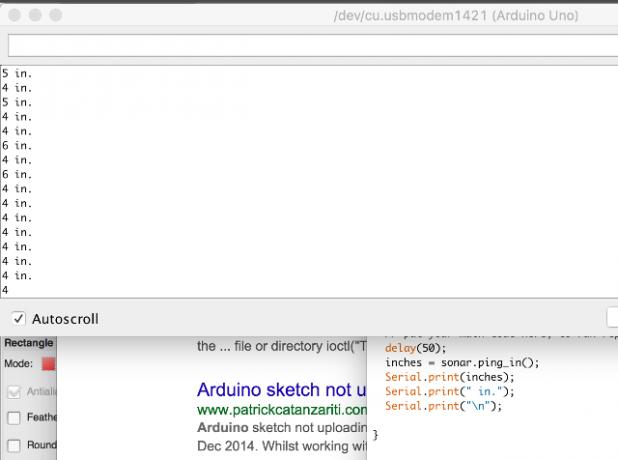
Téléchargez l'esquisse et ouvrez le moniteur série à l'aide de Outils> Moniteur série. Vous devriez voir une séquence de nombres rapidement mise à jour. Tenez votre main devant le capteur et voyez si ce nombre change. Déplacez votre main vers l'intérieur et vers l'extérieur, et vous devriez obtenir une mesure de la distance qui sépare votre main du capteur.
Si tout a fonctionné correctement, il est temps de tout assembler et de laisser cette chose fonctionner! Voici le code du robot maintenant. Comme vous pouvez probablement le constater, il s'agit essentiellement des deux croquis de test mis en place avec une instruction if ajoutée pour contrôler le comportement du robot. Nous lui avons donné un comportement d'évitement d'obstacles très simple: s'il détecte quelque chose à moins de quatre pouces de distance, il sauvegardera, tournera à gauche et recommencera à se déplacer. Voici une vidéo du bot en action.
Donnez de la vie à votre robot
Une fois que ce comportement fonctionne correctement, vous pouvez ajouter un comportement plus complexe; faire alterner le robot entre tourner à gauche et à droite, ou choisir au hasard; faire retentir un signal sonore s'il se rapproche de quelque chose; il suffit de tourner, au lieu de reculer; vous n'êtes vraiment limité que par votre imagination. Vous pouvez utiliser à peu près n'importe quoi dans votre Kit de démarrage Arduino Que contient votre kit de démarrage Arduino? [Débutants Arduino]Face à une boîte pleine de composants électroniques, il est facile de se laisser submerger. Voici un guide pour savoir exactement ce que vous trouverez dans votre kit. Lire la suite pour ajouter plus de fonctionnalités. Vous remarquerez également que nous n’avons encore rien codé pour le servo: vous pouvez réellement faire bouger les «yeux» de votre robot d’avant en arrière. peut-être en les utilisant pour chercher un chemin au lieu de simplement reculer chaque fois qu'il trouve un obstacle directement devant.
Faites-nous savoir si vous décidez de construire ce robot ou un autre, et dites-nous comment vous décidez de personnaliser son comportement ou son apparence. Si vous avez des questions sur ce robot, postez-les dans les commentaires ci-dessous, et je verrai si je peux vous aider!
Dann est un consultant en stratégie de contenu et en marketing qui aide les entreprises à générer de la demande et des prospects. Il blogue également sur la stratégie et le marketing de contenu sur dannalbright.com.

